دستگاه اسکنر چشم 3D-OCT1000 در تاریخ سوم امرداد 1400 جهت موتوردار کردن محورهای حرکتی و امکان پذیر شدن کنترل محورها از طریق کامپیوتر به شرکت ایده پردازان پویا تک ماهان واگذار گردید.
این دستگاه ساخت شرکت TOPCON کشور ژاپن می باشد که در مدل های متنوع و بصورت موتوردار و بدون موتور تولید میشود. در مدل دستگاهی که در این گزارش معرفی شده، دستگاه دارای قابلیت حرکت و جابجایی در 3 محور مجزا میباشد. دو محور در راستای X و Y که کاملا بر یکدیگر عمود هستند. محور دیگر که بر دو راستای قبلی عمود بوده و در این گزارش Z نامیده می شود. لازم به ذکر است که نامگذاری محورها صرفا توسط پیمانکار (شرکت ایپتک) و به منظور ایجاد نظم و هماهنگی در روند طراحی مکانیکی و الکترونیکی دستگاه صورت گرفته است. بدین صورت که محور حرکتی که در راستای محور اپتیکی سیستم تصویربرداری قرار گرفته X و محور متعامد با آن Y نامیده شده. همچنین محوری که ارتفاع سیستم تصویربرداری را تغییر می دهد نیز Z نام گرفته است.

خواسته های فنی پروژه
- جابجایی مکانیزه در سه محور X، Y و Z با قابلیت کنترل از طریق کامپیوتر طبق پروتکل های تعریف شده
- امکان جابجا کردن دستگاه در راستای محورها با نیروی دست، در صورت فعال یا غیر فعال بودن موتورها
- توانایی حرکت دستگاه با حداقل دقت 0.1 میلی متر در هر سه محور
- عدم برهم ریختگی ظاهر دستگاه به واسطه نصب ادوات و قطعات مدولها
- حرکت با لرزش و صدای کم در مدولها
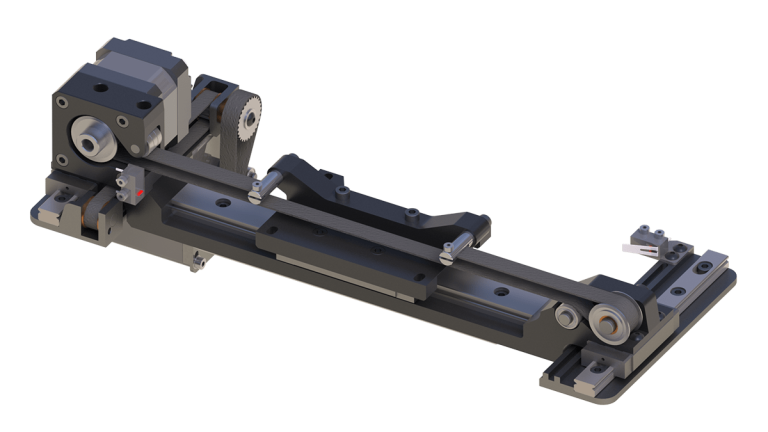
مدول دو محور (X-Y) دستگاه OCT1000
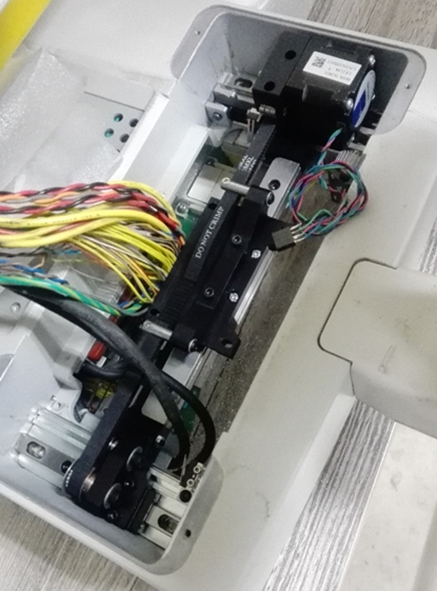
اصلی ترین چالش در طراحی این قسمت، جانمایی تمامی قطعات مدول مربوطه در فضایی بسیار محدود در بخش زیرین دستگاه OCT1000 به شمار می رود. چراکه این دستگاه در طراحی اولیه بصورت پیش فرض بدون موتور و سیستم انتقال قدرت در نظر گرفته شده است و فضای کافی برای تعبیه کردن موتور و تجهیزات انتقال قدرت وجود ندارد. از طرفی برای به حرکت در آوردن قسمتهای متحرک نسبتا سنگین وزن دستگاه، موتورهای با توان مناسب لازم است. با توجه به محاسبات صورت گرفته جهت تعیین گشتاور و دقت مورد نیاز، میبایست موتورهایی مجهز به جعبه دنده و یا با ابعاد به مراتب بزرگتر از فضای در دسترس تهیه گردد.
وجود جعبه دنده باعث نقض حرکت دو طرفه در محورها میشود و موتور بزرگتر نیز در فضای داخلی قابل تعبیه نخواهد بود. مگر آنکه بیرون از قسمتهای داخلی و بصورت متصل به بدنه خارجی در نظر گرفته شود که این مورد هم شرایط و خواستههای اولیه پروژه که در بخش قبل شرح داده شد را نقض خواهد کرد.
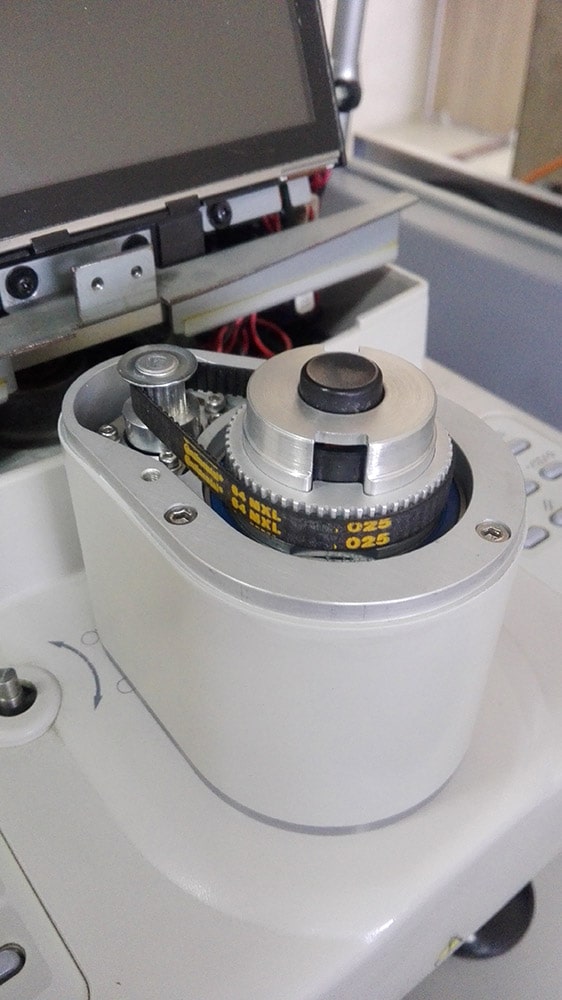
بر همین اساس در طرح نهایی از موتورهایی استفاده شده که در متناسب ترین ابعاد ممکن نسبت به فضای داخلی باشد. از سوی دیگر به منظور افزایش گشتاور، بسته به شرایط و فضای در دسترس، از مکانیزم های انتقال قدرت تسمه ای بهره گرفته شده است. در مکانیزم انتقال قدرت تسمهای امکان تحریک سیستم از سمت پولی متحرک به سمت پولی محرک وجود دارد. پس کاربر میتواند در شرایطی که کنترلر دستگاه غیر فعال است قسمتهای متحرک دستگاه را با نیروی دست جابجا نماید. البته این سیستم در حد چند میلی متر باعث کاهش طول کورس عملکرد محورها میشود.


دقت و کیفیت دستگاه
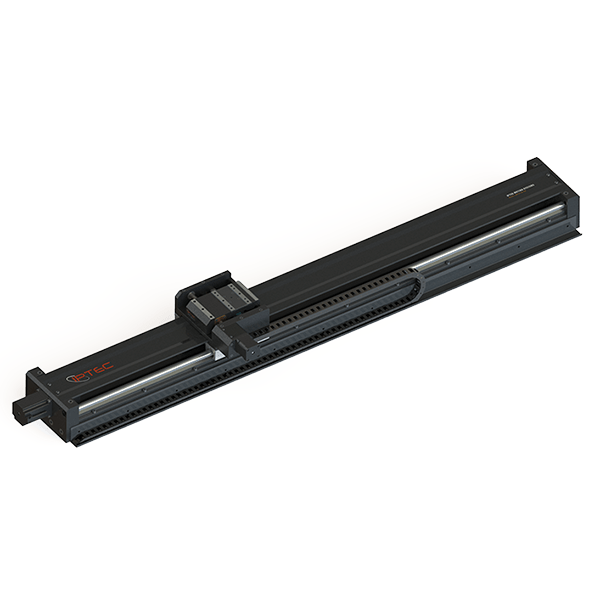
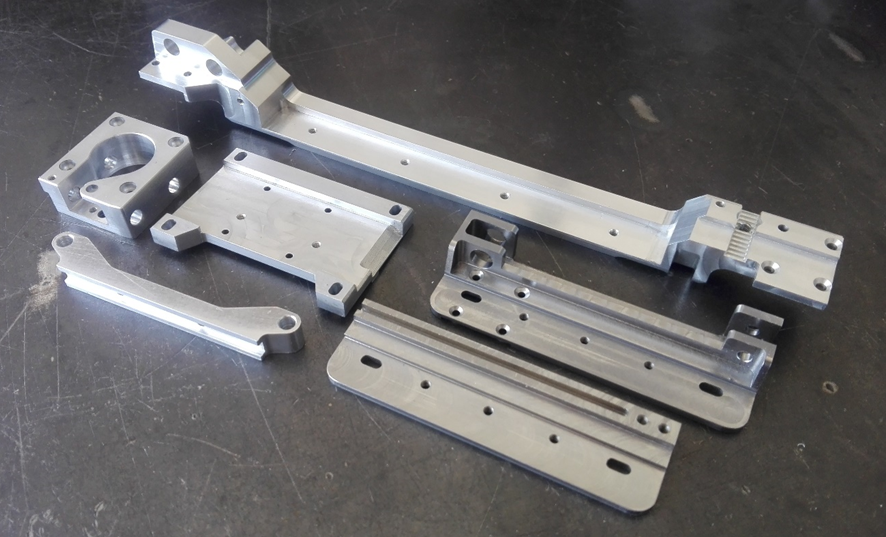
در طراحی مدولهای رباتیک، محورها میبایست کاملا مقید و بدون لقی در نظر گرفته شوند تا از ایجاد خطا در پارامترهای حرکتی دستگاه جلوگیری شود. به همین منظور در مدول X-Y جدید از ریلهای سنگ خورده و بسیار دقیق با ابعاد و ظرفیت متناسب با بارگزاری و فضای کاری موجود بهره گرفته شده است. لقی حرکتی مابین واگن مخصوص و ریلها در این مدول در حدود 0.005 میلی متر میباشد. از دیگر مزایای این نوع از ریلها، امکان تعویض و به روز رسانی قطعات آن شامل واگن مخصوص و خود ریل است. بدین معنا که علیرغم کیفیت بالا و طول عمر زیاد این قطعات، اگر به هر دلیلی اعم از کارکرد زیاد و خستگی قطعات و یا آسیب دیدگی ناشی از ضربه یا بار اضافه، ریل و یا واگن مستهلک شدند، میتوان با تامین قطعات یدکی از بازار به سادگی مشکل را برطرف نمود.
شاسی مدول از جنس آلومینیوم آلیاژی بسیار مستحکم و همچنین فولاد کربنی ساخته شده که بصورت خاص برای این دستگاه طراحی شده است. تمامی قطعات مانند ریل، واگن، موتورها، پولیها، تسمه و … به نحوی بر روی شاسیها سوار شده اند و از نظر هندسی با فضای کاری مدول و محل نصب آن کاملا منطبق میباشند.
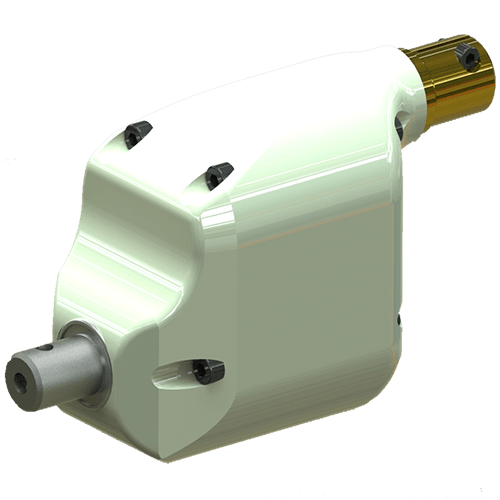
مدول Z (یونیت تغییر ارتفاع) دستگاه OCT1000
همانطور که در بخش معرفی دستگاه توضیح داده شد، تغییر ارتفاع در سیستم الکترواپتیکی دستگاه OCT1000 به وسیله چرخاندن طوقه آجدار اهرم (Joystick) به صورت ساعتگرد یا بالعکس انجام میپذیرد.
در طراحی مدول رباتیک مخصوص این دستگاه بهترین راهکار برای تغییر ارتفاع، نصب ادواتی جهت انتقال گشتاور به طوقه اهرم دستگاه بوده؛ چراکه در اینصورت لزومی برای تغییر و بازطراحی سیستم ریلی و قیدهای حرکتی این محور نخواهد بود و تنها میبایست اهرم را بصورت کاملا قائم مقید نمود.
برای این منظور پوستهای مخصوص طراحی گردید که از سطح زیرین به بدنه دستگاه متصل میشود و در قسمت داخلی با کمک گرفتن از بلبرینگهای خاص میتوان اهرم را مقید به حرکت دورانی کرد و نیز در محفظه جانبی و بخش فوقانی این پوسته استپرموتور و مکانیزم انتقال قدرت مدول جای میگیرد.